Dobb·E
About Dobb·E
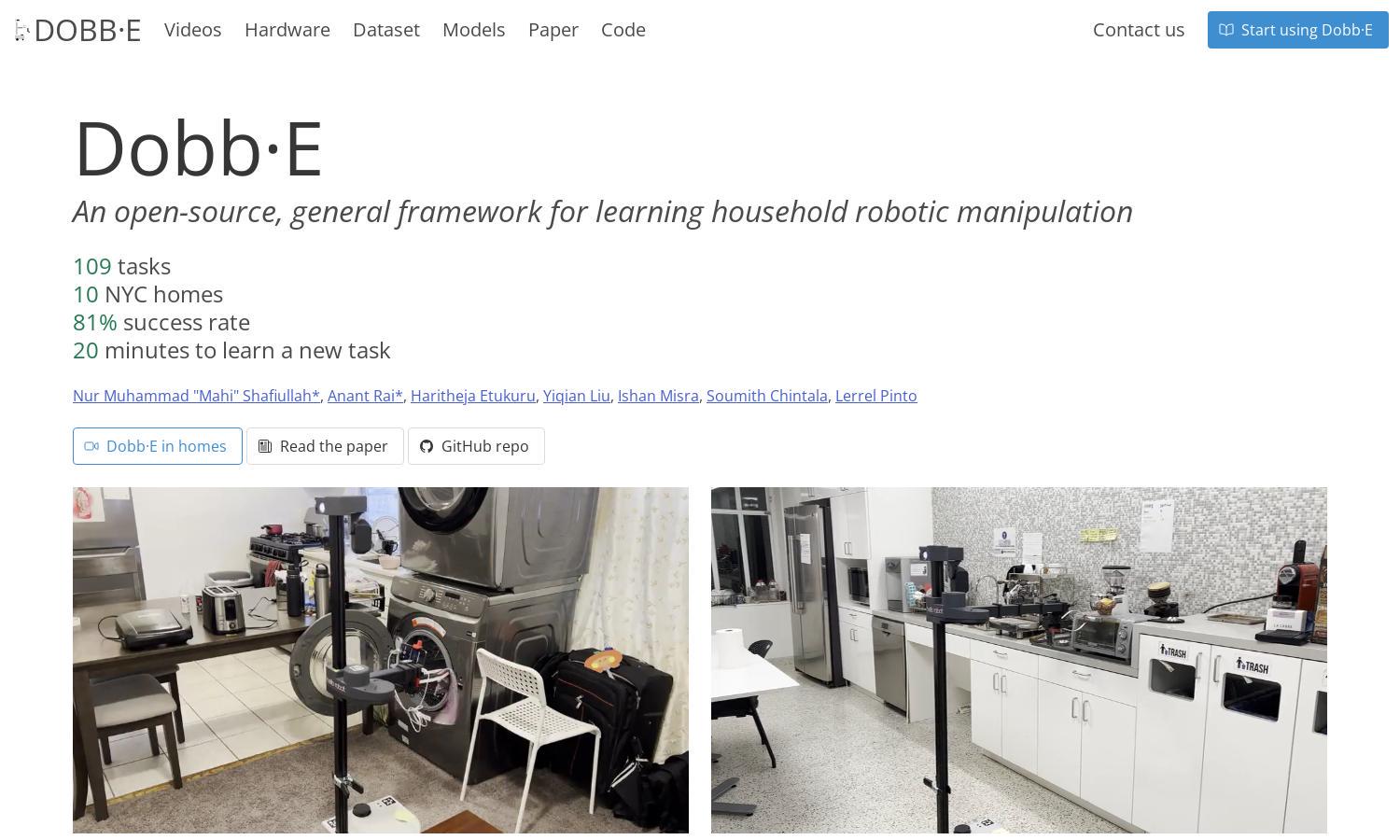
Dobb·E is an open-source framework designed for teaching robots to perform household tasks through imitation learning. It enables users to train robots quickly and efficiently, achieving a success rate of 81%. The platform is ideal for researchers and hobbyists interested in home robotics.
Dobb·E offers free access to its open-source software, models, and datasets. Currently, there are no paid subscription tiers, allowing users to leverage its innovative features without financial barriers. Upgrading is not necessary, as all resources are freely available, promoting widespread use and collaboration.
Dobb·E features a user-friendly interface designed for seamless navigation. Its layout emphasizes intuitive access to tasks, datasets, and documentation, enhancing user experience. This design ensures users can quickly utilize the platform's capabilities, facilitating efficient learning and experimentation with household robotics.
How Dobb·E works
To use Dobb·E, users start by collecting demonstrations of household tasks with a simple tool called "The Stick." The data is input into the system for processing and training its Home Pretrained Representations (HPR) model. Users can then quickly adapt the robot to new tasks in different environments, achieving noteworthy success rates with minimal input time.
Key Features for Dobb·E
Imitation Learning Framework
Dobb·E features a cutting-edge imitation learning framework that allows robots to learn household tasks in just 20 minutes. By utilizing a specialized tool, users can provide demonstrations that Dobb·E transforms into actionable skills, making home robotics accessible and practical for everyday users.
Dataset Collection Tool
The Stick is a unique demonstration collection tool created by Dobb·E, made from inexpensive components. This tool simplifies the process of gathering task demonstrations, enabling comprehensive data collection that significantly enhances the robot's ability to learn and adapt in various home environments.
Home Pretrained Representations (HPR)
Dobb·E's Home Pretrained Representations (HPR) is a powerful model that streamlines the process of adapting robots to new tasks. Pre-trained on extensive data, HPR allows users to rapidly implement robotic functionalities, enabling higher efficiency and effectiveness in home automation tasks.